- Ishit Mehta, UC San Diego
- Manmohan Chandraker, UC San Diego
- Ravi Ramamoorthi, UC San Diego

Locally Orderless Images for Optimization in Differentiable Rendering
CVPR 2025 (Highlight)
Abstract
Main Figures
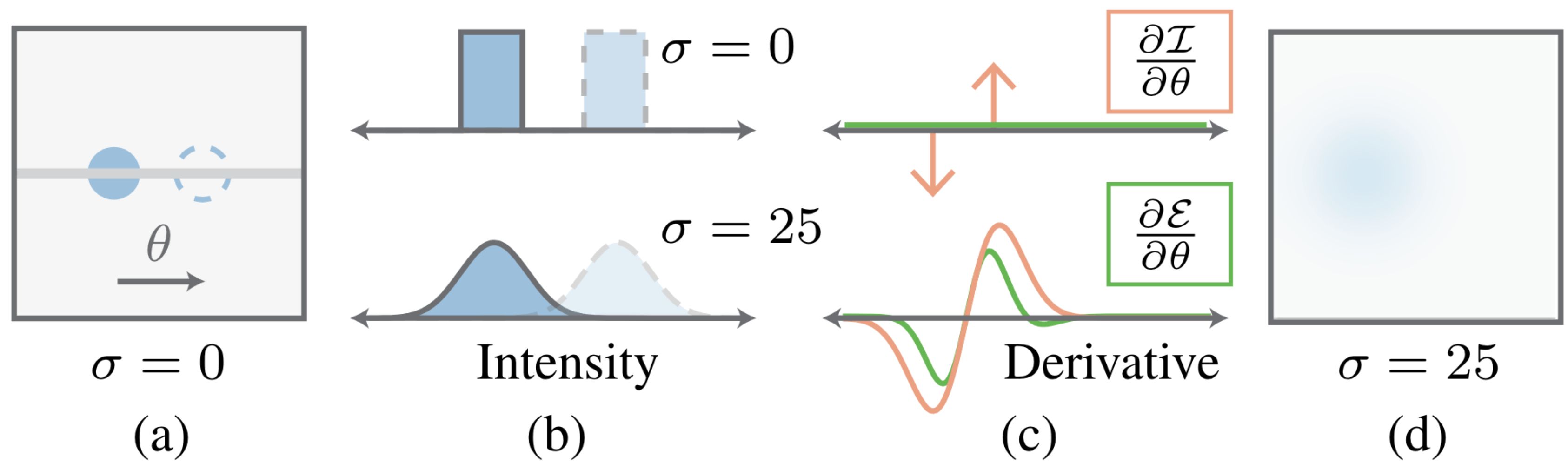
Figure 1: Scale-space matching extends gradient support. Given an image (a) of a disk we recover its position θ on the horizontal axis. At stationary resolution (σ = 0), the initial and target (dotted) disks do not overlap, as shown in the corresponding 1D signals in (b). The image gradient ∂I/∂θ is sparse (orange) and is non-zero only at the boundaries of the disk (c-top). The error gradient ∂E/∂θ is zero everywhere (green) and the optimization is stuck in a local minimum. When matching at coarser scales (d), the gradients are no longer sparse (c-bottom), leading to optimal recovery.
Figure 2. Tonal Separation. Shown are two (a-top and a-bottom)
1D inverse problems where we recover disk positions (θ) from
images (left). Image matching within σ-space measures only the
errors in the mean of the intensity distributions at each scale. In
inverse settings that involve multiple objects with different appear-
ances, this approach is likely to get stuck in a local minimum
(a-center-left). The α-space integration kernels are intensity-aware
and treat images as sets of distinct equal-intensity isophotes (b).
When images are matched in all three scale spaces, the optimization
is less prone to getting stuck in local minima (a-center-right).
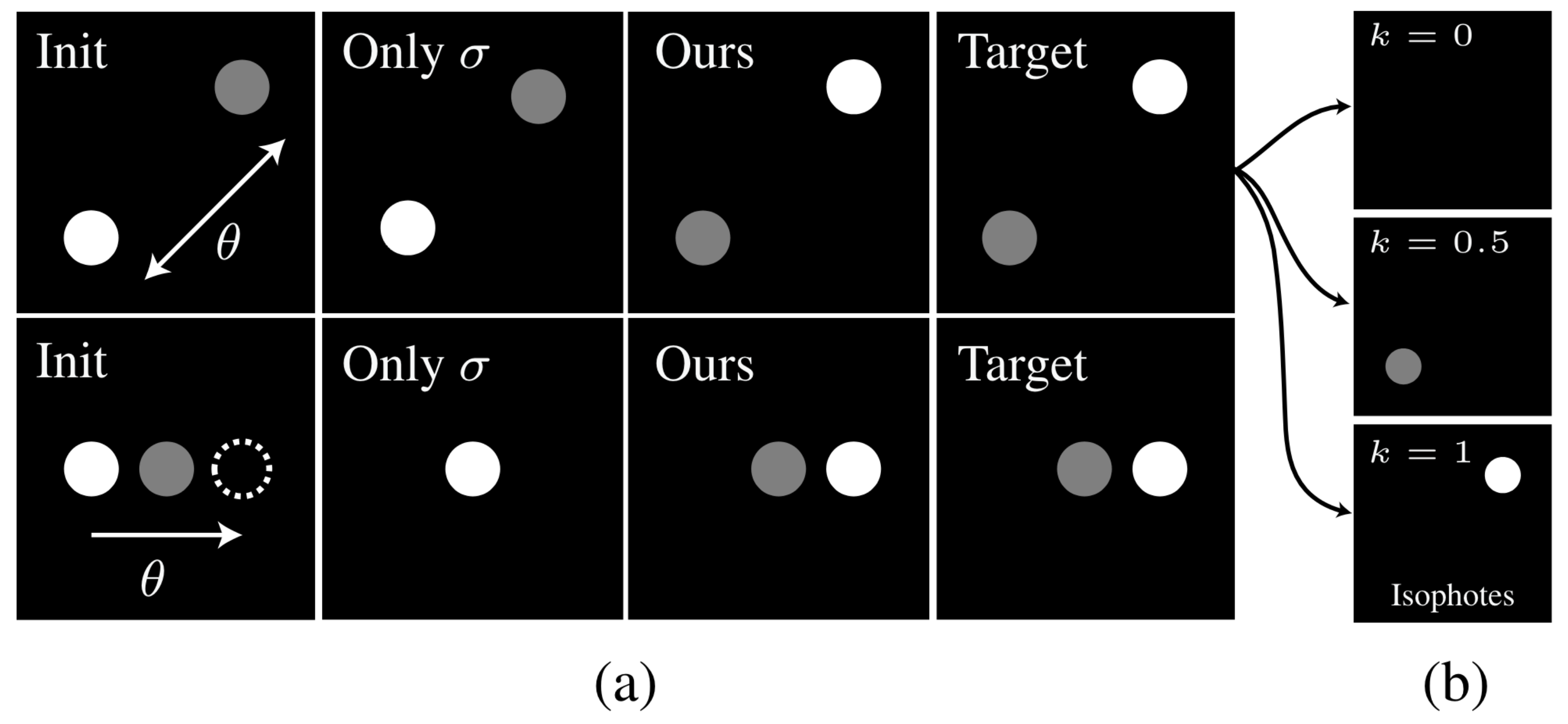
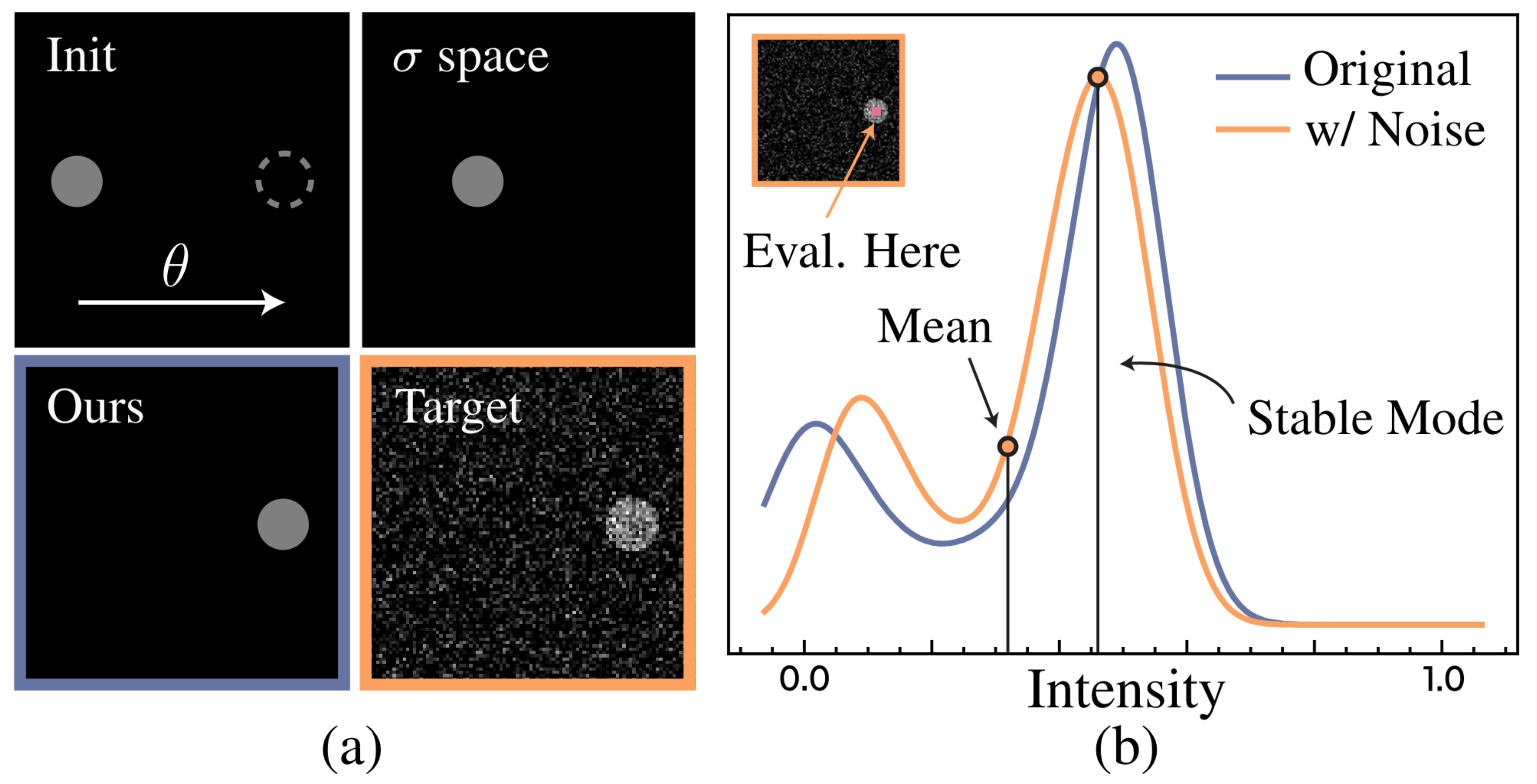
Figure 3. Histogram matching is less sensitive to noise. To
recover the position (θ) of a circular disk from a noisy reference
image (a-bottom-right), methods that match images only at their
stationary resolution or in σ-scale space fail — as they overlook
imprecision and uncertainty in radiance measurements. Our method
uses a tonal parameter (β) to account for intensity uncertainty and
an extent scale-space to preserve the distribution modes at coarser
scales (b), leading to optimal recovery of θ.